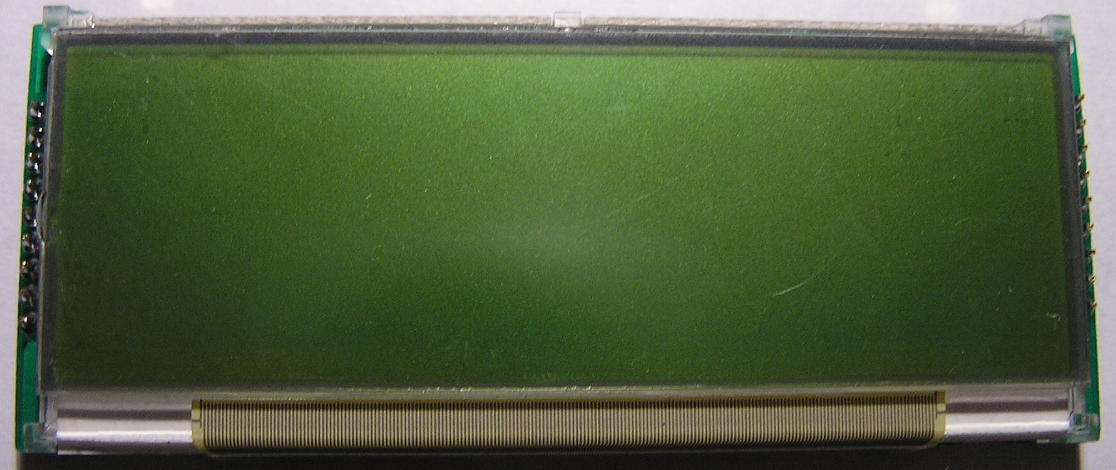
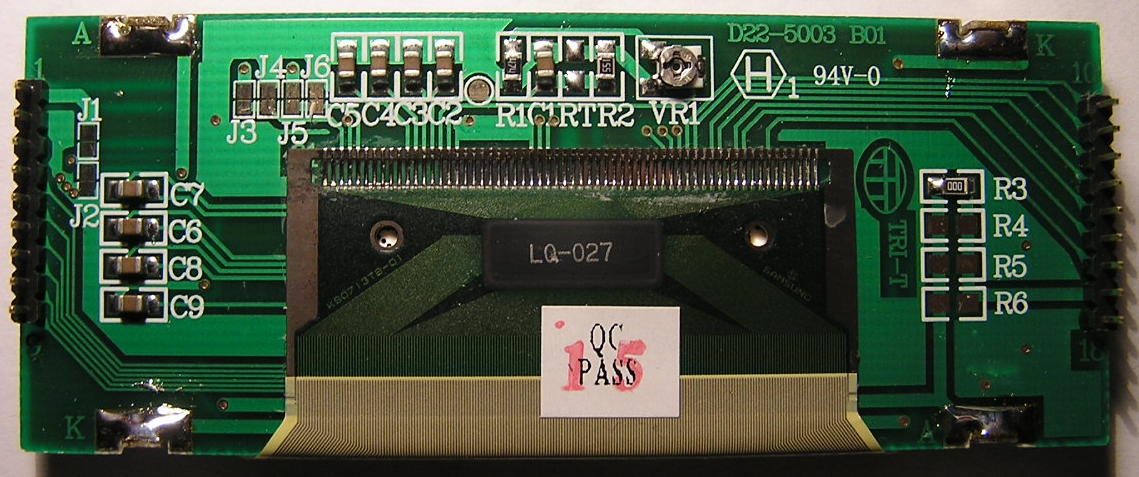
Graphic LCD display
28th August 2005
I've recently bought online a large quantity of displays and paid a very good price for the lot. The displays came "as is" with absolutely no documentation or hint from the web. The company that originally produced them was out of business and their website was gone. I hopped that I will be able to reverse engineer these displays and my work paid off.